Cảm biến tốc độ và cảm biến mô-men là thiết bị nhận tín hiệu từ người điều khiển xe đạp trợ lực điện, giúp hệ thống trợ lực kích hoạt và hỗ trợ tốc độ phù hợp với yêu cầu của người lái. Vậy chúng có cấu tạo thế nào, hoạt động ra sao, và những đặc điểm gì khác biệt giữa 2 loại cảm biến này? chúng ta cùng Pigo tìm hiểu ngay sau đây.
Cảm biến tốc độ (cảm biến nhịp).
Cấu tạo cảm biến tốc độ trên xe đạp trợ lực.
Cảm biến tốc độ (tên tiếng anh: Speed sensor) có cấu tạo gồm 2 phần chính, vòng nam châm và cảm biến từ tính. Vòng nam châm sẽ được gắn trên bộ phận chuyển động quay (trục xe đạp) và phần cảm biến sẽ được gắn lên khung xe.

Nguyên lý hoạt động của cảm biến tốc độ.
Cảm biến mô-men (cảm biến lực).
Cảm biến mô-men (tên tiếng anh: Torque sensor) được chia làm 2 loại chính là cảm biến tiếp xúc và không tiếp xúc.
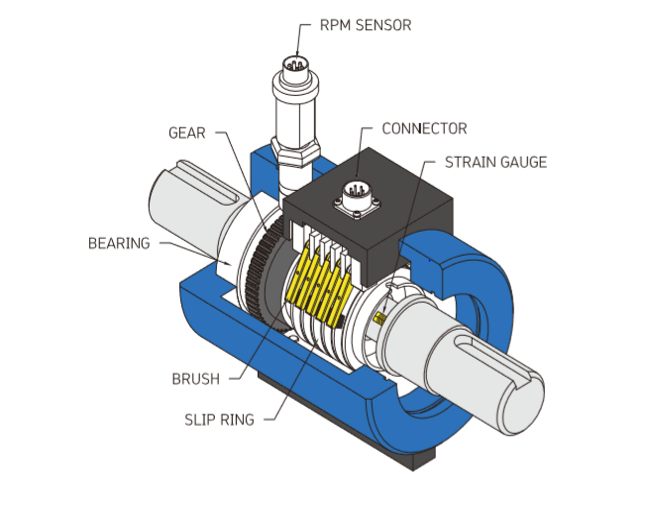
Cấu tạo và nguyên lý hoạt động của cảm biến mô-men tiếp xúc.
Cảm biến có đầu dò (bằng vật liệu đàn hồi) tiếp xúc với bộ phận gắn lên trục xe đạp, độ lớn biến dạng của đầu dò này tỉ lệ thuận với mô-men (lực) tạo ra trên trục xe đạp. Khi lực đạp càng mạnh, biến dạng đầu dò càng lớn.
Cấu tạo và nguyên lý hoạt động của cảm biến mô-men không tiếp xúc.
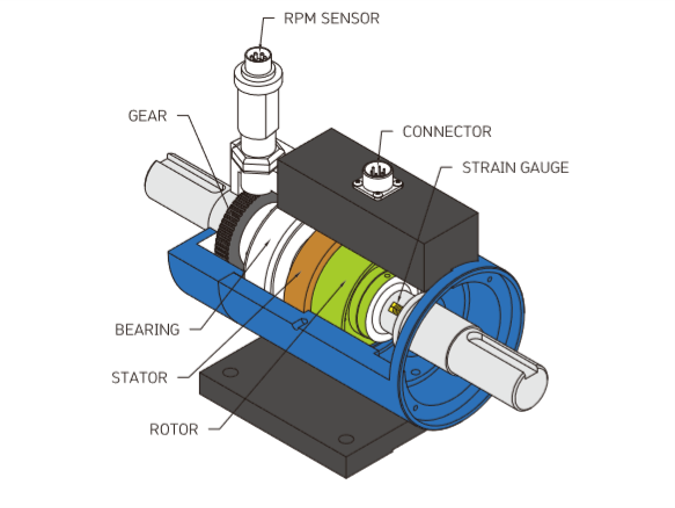
Thông tin cũng sẽ qua bộ điều khiển và gửi đến động cơ để đưa ra mức hỗ trợ phù hợp với người đạp.
So sánh 2 loại cảm biến.
Đều là các bộ phận nhận tín hiệu từ người lái nhưng sự khác nhau về cấu tạo và nguyên lý hoạt động của 2 loại cảm biến tạo ra sự khác biệt nhất định về một số tính chất cho xe đạp trợ lực điện của bạn, bảng so sánh dưới đây liệt kê những sự khác biệt nổi bật nhất.
| So sánh | Cảm biến mô-men | Cảm biến tốc độ |
Nguyên lý |
Xác định trợ lực cần cung cấp bằng cách đo lực đạp của người lái. | Xác định trợ lực cần cung cấp bằng cách đo tốc độ đạp của người lái. |
Độ nhạy |
Độ nhạy chính xác với lực đạp cung cấp từ người lái. | Độ nhạy ở mức cao, cung cấp lực đạp nhỏ hơn để có tốc độ tương tương với xe gắn cảm biến mô-men. |
Điều khiển tốc độ |
Điều khiển tốc độ chính xác với lực cung cấp. | Không điều khiển tốc độ một cách chính xác vì cảm biến nhạy nên động cơ cung cấp nhiều lực hỗ trợ. |
Xuất phát |
Ngay khi tác động lực đạp cảm biến đã tiếp nhận và hỗ trợ. | Cần tạo một góc xoay nhỏ của trục để cảm biến có thể tính tốc độ đạp và hỗ trợ. |
Ảnh hưởng đến năng lượng pin |
Tiết kiệm pin hơn vì hệ thống hỗ trợ lực sẽ ngừng hoạt động ngay khi người lái dừng cung cấp lực đạp. | Vì độ nhạy cao nên khi dừng đạp hệ thống vẫn hỗ trợ trong một khoảng thời gian ngắn sau đó dẫn đến tiêu thụ năng lượng hơn. |
Giá thành |
Vì cấu tạo phức tạp nên giá thánh cao. | Cấu tạo đơn giản nên giá thành rẻ. |
Kết luận.
